Nowoczesne systemy sterowania ruchem kolejowym
System sterowania ruchem kolejowym (srk) jest odpowiedzialny za bezpieczne przemieszczanie się pojazdów szynowych po sieci kolejowej. W transporcie kolejowym pierwsze rozwiązania techniczne systemów sterowania ruchem kolejowym bazowały na rozwiązaniach układów przekaźnikowych oraz prostych układach komputerowych.
Normy i bezpieczeństwo
W systemach przekaźnikowych bezpieczeństwo oparte było na niesymetryczności uszkodzeń przekaźnika elektromagnetycznego (1→0, 0→1). W systemach komputerowych zastosowano nadmiarowość na poziomie sprzętu i oprogramowania oraz samotestowanie, co wprowadziło wielokanałowe, nadmiarowe przetwarzanie danych.
Obecnie stosowane w Polsce systemy stanowią zbiór urządzeń komputerowych, przekaźnikowych i mechanicznych. Zgodnie z raportem PKP Polskie Linie Kolejowe S.A. za 2014 r., w przeważającej części nadal w Polsce funkcjonują urządzenia przekaźnikowe i mechaniczne, jednak rozwój technik mikroprocesorowych spowodował implementację systemów typu hybryda (rozwiązania przekaźnikowo-komputerowe). Komputerowe systemy srk pracują w 166 okręgach nastawczych i sterują 3720 zwrotnicami i 4038 sygnalizatorami (raport PKP PLK S.A., 2014).
Urządzenia srk pod względem spełnianych funkcji dzielą się na:
■ kontroli prowadzenia pociągów
■ systemy liniowe (kontrolujące poprawną sekwencję przemieszczania się pojazdów między posterunkami-stacjami)
■ systemy stacyjne (sterujące przemieszczaniem się pojazdów w obszarze pojedynczego posterunku ruchu lub wielu powiązanych posterunków)
■ zdalnego sterowania (stanowią system nadrzędny dla stacyjnych i liniowych urządzeń srk)
■ zabezpieczenia ruchu na przejazdach kolejowo-drogowych
■ sterowania rozrządem (m.in. nastawianie zwrotnic w strefie podziałowej górki, sterowanie hamulcami odstępowymi i docelowymi).
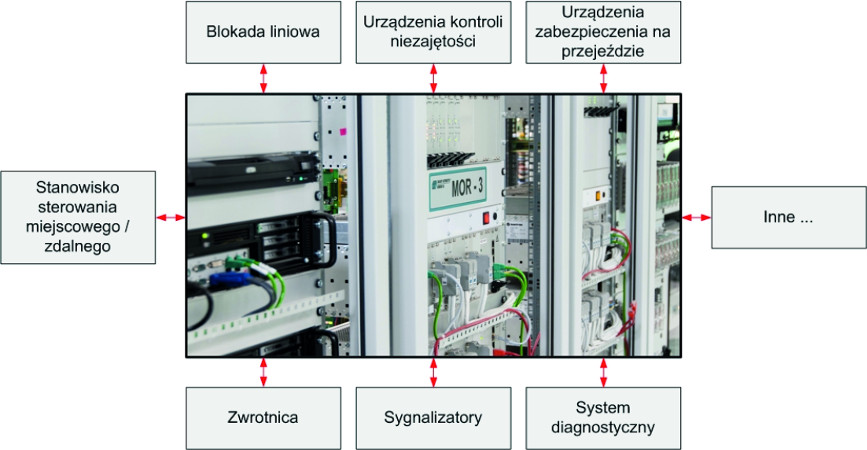
Współczesne komputerowe systemy srk obejmują m.in. (rys. 1):
■ systemy nadrzędne
■ systemy zdalnego sterowania
■ systemy zależnościowe
■ systemy liniowe (ssp, blokady liniowe)
■ ATP/ATC.
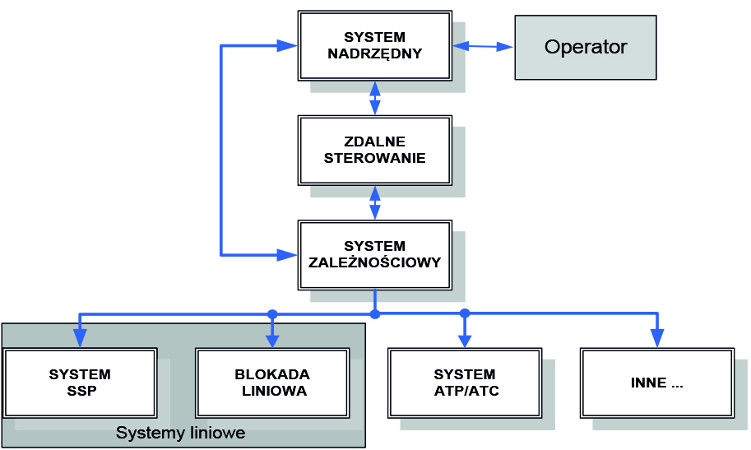
Rys. 1. Podstawowy schemat blokowy systemu srk
Komunikacja pomiędzy urządzeniami odbywa się za pomocą standardów transmisji zamkniętej i otwartej. Niezwykle ważną kwestią dotyczącą systemów srk jest bezpieczeństwo. Zgodnie z klasyfikacją UIC (ang. International Union of Railways) i CENELEC (fr. Comité Européen de Normalisation Electrotechnique) wprowadzono cztery poziomy bezpieczeństwa systemu SIL (ang. System Integrity Level) przedstawione w tablicy 1.
W Polsce, podobnie jak w innych państwach Unii Europejskiej, poszczególne systemy srk zostały przyporządkowane do poziomów bezpieczeństwa, co przedstawiono w tablicy 2.
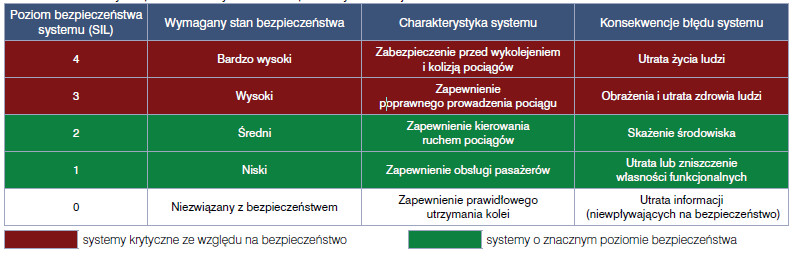
Tablica 1. Poziomy bezpieczeństwa systemów komputerowych w kolejnictwie
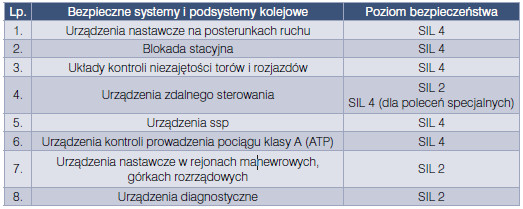
Tablica 2. Klasyfikacja wybranych bezpiecznych systemów kolejowych
Współczesne komputerowe systemy srk muszą zapewnić ten sam poziom bezpieczeństwa, co systemy poprzedniej generacji (przekaźnikowe). Projektowanie nowych urządzeń, w myśl zasady „fail-safe”, powoduje iż żadna pojedyncza usterka nie może być przyczyną sytuacji niebezpiecznej, dodatkowo powinna być wykrywana w możliwie najkrótszym czasie, po którym powinna zostać zainicjowana reakcja bezpieczeństwa prowadząca do sterowania awaryjnego. Zasada „fail-safe” zapewnia bezpieczeństwo strukturalne, tj. właściwość obiektu zapobiegającą powstawaniu uszkodzeń powodujących stany niezdatności krytycznej. Zasada ta może być zrealizowana poprzez:
■ wielokanałowość przetwarzania i redundancję na poziomie systemu, sprzętu i oprogramowania (ang. multichannel redundant systems)
■ samotestowanie (ang. self-checking, self-testing, self-diagnosis).
Każdy system srk przed wprowadzeniem do eksploatacji musi spełniać wymagania obowiązujących norm oraz mieć certyfikat dopuszczający do użytkowania na linii kolejowej. W normie PN-EN 50126 określono niezawodność, gotowość, dostępność i bezpieczeństwo (RAMS – Reliability, Availability, Maintainability and Safety), jako proces oparty o cykl życia systemu (ang. system life-cycle). Norma PN-EN 50128 określa procedury i wymagania techniczne dla projektowania oprogramowania bezpiecznego systemu elektronicznego dla sterowania i zabezpieczenia na kolei. Norma PN-EN 50129 definiuje wymagania dotyczące projektowania, testowania, odbioru i zatwierdzania elektronicznych systemów, podsystemów i urządzeń sygnalizacji związanych z bezpieczeństwem w zastosowaniach kolejowych. W normie tej uwzględniono specyfikację, konstrukcję, instalację, działanie, obsługę i fazy modyfikacji (rozbudowy) kompletnych systemów sygnalizacji oraz oddzielne podsystemy i urządzenia wchodzące w ich skład. Na przestrzeni kilku lat można również zaobserwować implementację rozwiązań opartych na sieciach radiowych. Bezpieczna transmisja danych zarówno w zamkniętych, jak i otwartych systemach srk musi spełniać wymagania i zalecenia określone w obowiązujących normach. Szczegóły dotyczące zastosowania takiej transmisji zawarto w dedykowanej dla transportu kolejowego normie PN-EN 50159:2011 Zastosowania kolejowe – Systemy łączności, sterowania ruchem i przetwarzania danych – Łączność bezpieczna w systemach transmisyjnych.
Wprawdzie obowiązujące normy CENELEC, zwłaszcza PN-EN 50129, wprowadzają akceptowalny poziom ryzyka wyrażony przez wskaźnik THR (ang. Tolerable Hazard Rate), to bezpieczeństwo systemów komputerowych zależy nie tylko od intensywności uszkodzeń i czasu ich detekcji, ale również od opóźnień powstałych przy transmisji informacji pomiędzy elementami systemów i generalnie od czasu reakcji systemu na uszkodzenie. Wskaźnik THR jest podstawowym kryterium kwalifikacji systemów srk zaproponowanych przez CENELEC. Podany wskaźnik został określony w następujący sposób:
gdzie:
λi – intensywność uszkodzeń dla kanału
tdi-1 – czas reakcji systemu na błąd od czasu powstania dla kanału i.
Uwzględniając takie parametry jak:
■ czas reakcji systemu na błąd od czasu wykrycia
■ czas reakcji systemu na błąd od czasu powstania
■ czas cyklicznego testowania elementu systemu
■ średnie czasy TMBF składowych systemu można wyznaczyć wskaźnik THR, którego wartości dla poszczególnych poziomów SIL przedstawiono w tablicy 3.

Tablica 3. Wartości THR dla odpowiednich poziomów SIL
Systemy srk
Zgodnie z rys. 1 system nadrzędny stanowi swego rodzaju interfejs pomiędzy systemem zależnościowym i operatorem. Na fot. 1 przedstawiono przykłady centrum sterowania ruchem kolejowym (stanowiska operatorów). Operatorzy kontrolują i sterują ruchem pociągów w całym obszarze, mając podgląd na monitorach o sytuacji ruchowej na szlaku, na poszczególnych stacjach i na przejazdach kolejowych.
 |
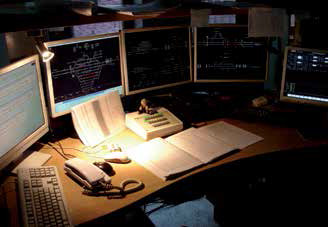 |
| Fot. 1. Stanowiska operatorów: nastawnia Drzewica | nastawnia Żywiec |
System nadrzędny stanowi zbiór urządzeń wspomagających pracę dyspozytora (m.in. realizuje funkcję kontroli dyspozytorskiej). System ten pomaga w realizacji zadań związanych z nadzorem i kierowaniem ruchem pociągów, a w przypadku wykrycia konfliktów – wprowadzaniem odpowiednich korekt ruchu. W skład systemów nadrzędnych mogą również wchodzić podsystemy związane z urządzeniami diagnostycznymi. Kolejną grupą urządzeń kolejowych stanowią systemy zdalnego sterowania. Służą one do sterowania na odległość urządzeniami srk. Pozwala to na sterowanie przez jednego dyżurnego ruchu wieloma posterunkami ruchu. Zastosowanie takich systemów powoduje m.in. zmniejszenie kosztów związanych z obsługą wydzielonej linii kolejowej. Systemy nadrzędne oraz zdalnego sterowania współpracują z systemami zależnościowymi. Zadaniem systemu zależnościowego jest wykonanie, we współpracy z systemem nadrzędnym, bezpiecznych funkcji zależnościowych. Systemy zależnościowe stanowią n-kanałową, dwu- („2z2”) lub trzykanałową („2z3”) strukturę wielomodułową. W systemach tych funkcje nastawiania przebiegów są realizowane w czasie rzeczywistym. Na rys. 2 przedstawiono przykładową strukturę systemu zależnościowego (system MOR-3).
Rys. 2. Schemat zależności w systemie MOR-3
Kolejną grupę systemów stanowią systemy liniowe, które są odpowiedzialne za realizacje przebiegów pociągów pomiędzy posterunkami. W skład tej grupy urządzeń wchodzą, m.in.: blokady liniowe, urządzenia zdalnego sterowania czy systemy samoczynnych sygnalizacji przejazdowych. Jednym z przykładów takich systemów jest samoczynna sygnalizacji przejazdowa typu RASP-4F, którą pokazano na fot. 2.
W przedstawionym na fot. 2 systemie do wykrywania zajętości toru zastosowano układ liczników osi pociągu. W skład systemu wchodzi, m.in.: kontener główny (RASP-KG), szafy aparatowe (RASP-SA1, RASP-SA2) oraz urządzenie zdalnej kontroli (RASP-UZK). W celu zachowania wysokiego poziomu bezpieczeństwa w systemie zastosowano strukturę nadmiarową typu „2z2” w urządzeniach:
■ kontrolno-sterujących wraz z funkcją samotestowania
■ wykonawczych wraz z funkcją samotestowania
■ zasilających.
|
|
|
| Fot. 2. Elementy systemu RASP-4F | Fot. 3. Przykładowe wnętrze kontenera systemu ssp (RASP-4F) |


Na fot. 3 pokazano przykładowe wnętrze kontenera systemu RASP-4F.
W przypadku pojawienia się na szlaku w obrębie pracy systemu, pociągu, urządzenia kontrolno-sterujące odbierają sygnały od urządzeń oddziaływania pociągu. W tym momencie następuje załączenie urządzeń zewnętrznych takich jak sygnalizatory, napędy rogatek, tarcze ostrzegawcze. Sterowniki CPU1 i CPU2 systemu pracują synchronicznie sprawdzając wzajemnie swoje stany pracy. Działanie systemu jest również nadzorowane przez urządzenia zdalnej kontroli (RASP-UZK).
Podsumowanie
Obecnie na kolejach polskich realizowany jest program modernizacji i rewitalizacji linii kolejowych. Strategia PKP S.A. koncentruje się m.in. na poprawie bezpieczeństwa ruchu pociągów. Jest to możliwe poprzez inwestycje w nowoczesne urządzenia. Przedstawione systemy stanowią wąski przykład rozwiązań stosowanych na kolejach polskich. Wielomodułowa konstrukcja współczesnych systemów srk pozwala na ich konfigurację zgodnie z potrzebami zarządcy linii kolejowej. Pewną innowacją jest stosowanie transmisji radiowej. Ma to szczególne znaczenie na liniach regionalnych, mało obciążonych, gdzie implementacja tradycyjnych rozwiązań jest ekonomicznie nieopłacalna. Należy podkreślić, iż stosowane obecnie w Polsce rozwiązania systemów srk należą do grupy urządzeń bezpiecznych spełniających wszelkie wymagania bezpieczeństwa.
prof. dr hab. inż. Andrzej Lewiński
dr inż. Tomasz Perzyński
Uniwersytet Technologiczno-Humanistyczny w Radomiu
Literatura
1. Lewiński A., Perzyński T., Publiczne standardy transmisji bezprzewodowej w poprawie bezpieczeństwa w sterowaniu ruchem kolejowym, Przegląd Komunikacyjny, 5/2016.
2. Lewiński A., Nowoczesne systemy telematyki kolejowej, Wydawnictwo Politechniki Radomskiej, Radom, 2012.
3. Perzyński T., Ukleja P., Współczesne systemy srk. Rozwiązania, bezpieczeństwo, logistyka, Logistyka, 6/2014.
4. Raport PKP PLK S.A. 2014.